

Applying the 3Hs to decision-making during helicopter hoist operations.
On the 29 April 2020 at Biscarosse near Bordeaux in France, two crew members of a French Air Force H225 fell to their deaths when a hoist cable parted during a winch training exercise. (Summary report in English from Aerossurance.) The tragic outcome coupled with the recently published accident report, which (as you would expect) dedicates some significant attention to the technical aspects of the hoist and hoist cable, forced me to consider the question of how well I understand, and what I still have to learn, about the characteristics and dynamics of hoists and hoist cables. The answer, as it turns out, is more than I care to admit.
This potentially extremely complex subject could easily snowball into something that goes well beyond the capacity of my basic schoolboy physics, so my aim here is to keep things brief, simple, and as limited – and relevant – as possible to what a crew need to understand to be able to take sound and informed decisions on risk during hoist operations.
The Three Hs
Any hoist system on a helicopter can be considered to be made up of three elements.
- The Helicopter
- The Hoist
- The Human
The hoist, which is itself a machine, is mounted on a dynamic platform; the helicopter. The forces that affect the cable are a principally a combination of these two elements; the movements of the aircraft and the hoist itself. However, they are also affected in no small measure by the input of the humans in the system – variously, those of the hoist operator, pilot, winchman, survivor and maintenance technician. Our human interactions with the other elements of the system can affect the integrity of the system as whole, and it is on these interactions that I want to focus our attention.
There are two important facts to highlight at this point about the above described system.
- Despite the complexity of the three Hs, the hoist system has a single point of failure: The hoist cable.
- The first two elements of the system (the performance of the helicopter and the hoist) are often taken for granted by the humans.
For those whom dangling another human being on the end of a wire rope beneath an aircraft in flight has become routine and normalised, it can be difficult to remain attentive to the risks that would seem self-evident to others looking in from the outside. Trust in man and machine is a hugely important component in helicopter rescue. Trust in our colleagues and equipment is a product of experience and professional judgement – both theirs and ours. It requires an unceasingly questioning mindset.
Blind trust results when we stop asking questions as to the integrity of the equipment and the competence of the operators and it has no place in high risk environments. Simply knowing, for example, that the maximum hoist load well exceeds the weight of the person currently hanging beneath the aircraft, and reassuring ourselves that it has certainly been tested to a safety margin well above that limit, is not sufficient knowledge to fully appraise ourselves of the ‘what ifs’ and the risks we are currently accepting with its operation.
We also need to understand how and why cables can fail, which means having a basic grasp of the technical and load bearing characteristics of the hoist mechanism and of the cable itself. We need to know when to be concerned about their condition, and how to assess the impact of any incident involving the cable. We need to know how to look for the warning signs, both when pre-flighting the aircraft and during hoist operations.

How cables fail
To simplify as far as possible, cables fail when they become overloaded beyond their ultimate limit. This is called tensile overload, and comes in two forms, static, and dynamic.
Static Overload
Static overload is a slowly applied load which gradually stretches the wires in the cable. When the amount of stretch exceeds the cable´s capacity to stretch it starts to deform, damaging the cable in a non-recoverable way. The capacity of a cable to stretch is a function of its length, which means that the more cable you have out, the greater its elasticity and ability to absorb strain energy. Conversely, the shorter the length of cable, the more likely it is to be damaged in this way. Permanent damage to a (standard helicopter) cable will occur when subjected to a static load of above around 900kg.
Although the listed values for the ultimate static load of a standard 3/16 inch diameter helicopter cable seem reassuringly high, (1500kg) this figure drops dramatically in a fatigued cable (by over 30%). Furthermore, the most likely cause of static overload on a winch cable, which is probably from a snagging of the winch hook, can quickly and easily exceed this figure, never mind the lower limit at which it becomes permanently deformed.
Dynamic Overload
Dynamic overload happens when the mass of a static load is multiplied by the velocity of a rapidly applied load and is by far the greatest threat for a sudden and catastrophic cable failure. An example of this would be a fall on to the cable. The instant a moving body is stopped its kinetic energy is completely transformed into the internal strain energy of the cable. Its kinetic energy is a function of the mass of the falling object and the time which it is in free fall. Because this dynamic load increases as a square of its velocity, it can quickly exceed the ultimate load of the cable in a very short distance. This is called ´shock-loading´ and in a catastrophic case the dynamic induced force exceeds the cable´s ability to absorb the energy, causing the cable to fail and separate.
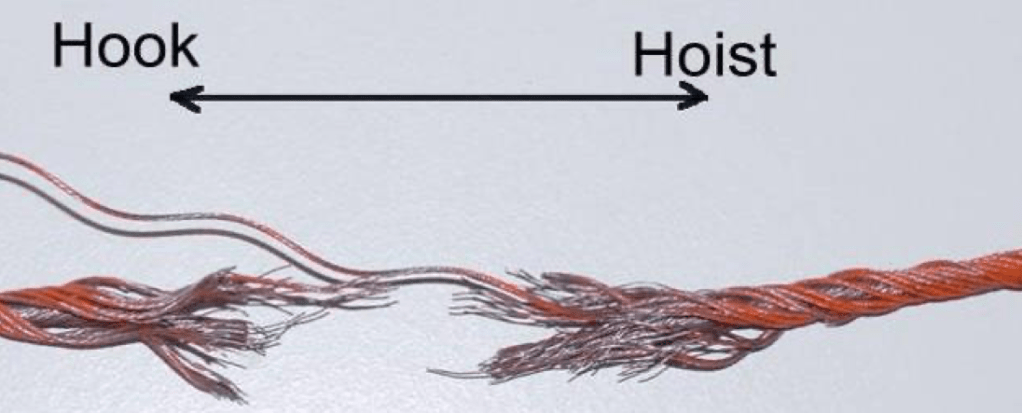
Shock load testing shows us that even a surprisingly small load falling a short distance can generate sufficient force to part a cable. For example, an 80kg winchman falling only 81cm (less than 3ft) on to a winch cable generates a dynamic force of 972kg, which is more than enough to break a standard helicopter winch cable, particularly if falling from the helicopter cabin with very little cable paid out to absorb the load. (Zephyr Int., Information on Helicopter Hoist Wire Rope, Failure Modes, and Rejection Criteria, p.37-8).
An excessive load in both static and dynamic forms, including the sudden release of a load from the cable, can cause internal damage to the wire core of a cable with no visible trace of damage on the external strands which might give away its condition to the operator or maintenance technician.
Why cables fail
Why cables fail is an altogether more complex question to answer. Either their tensile limitations are exceeded, or they become degraded and weakened, causing them to reach tensile overload before they should. This degradation could come about for any number of reasons to which we should be attentive, including fatigue from normal usage, poor maintenance practices, poor operating practices, manufacturing imperfections, corrosion, abrasion, and even damage from lightning strike or electrical discharge.
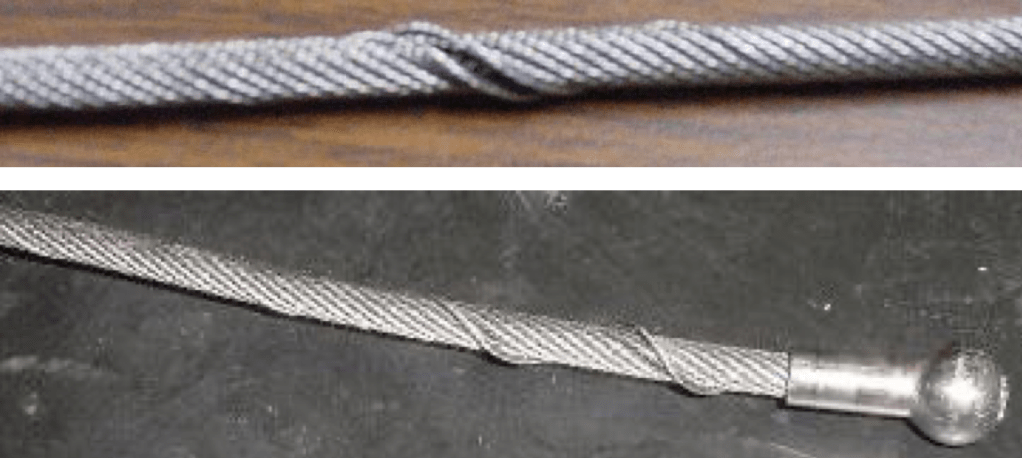


Poor operating practices that can twist a cable apart or seriously weaken it include stresses such as the rotation of a load upsetting the torsional balance of the wire rope, thus creating a birdcage, or the sudden release of a load (such as can result from a rescuer hitting the ground quickly, or using a quick release mechanism while in the air) which results in dynamic unloading and can cause a rebounding in in the internal core of the wire rope.
Abrasion, corrosion, and other forms of damage can be minimised through meticulous operating practices. Abrasion is typically caused by rubbing against the airframe, skids, hook etc. and causes a reduction in the local breaking strength of the cable. Rotation and excessive flexing at the ball end is often caused when crews connect or disconnect from the hoist hook in the helicopter cabin. High heat stresses in the cable can occur due to friction, electric discharge, and lightning strike, and can result in the weakening or cutting of individual or multiple strands.
The Human Factor
The Human in the system interacts with all of these factors. An example of how this interaction between the human factor in operation, maintenance, and design can have an impact on operational safety is evident in inconsistencies in how we count hoist cycles to manage fatigue life. Hoist manufacturer Goodrich says that a hoist cycle in flight is an extension and retraction of cable “regardless of the length of cable unwound and the load used”.
Counterintuitively, repeated cycling of the hoist under no load causes more fatigue to the cable than when the hoist is in normal use with a load attached. (This is due to the effect of the hoist tension rollers which tension the outer layer of cables but not the cable core leading to improper balancing and loose strands, or bird-caging, particularly towards the ball end.)
Using a cable to its maximum fatigue life will cause it to deteriorate from the inside out. As a result, rescue hoists are operated on a much less severe duty cycle than other cables. However, many crews and maintenance technicians don’t log the paying in and out of cable to the cabin, or during some maintenance tasks or preflight checks, which will seriously deteriorate that safety margin. Miscounting of hoist cycles is cited as a contributory factor in the Biscarosse accident.
Another recent occurrence of a broken rescue hoist cable occurred in Australia in February 2020, leading to a Safety Advisory Notice being issued. Again, the human factor played an important role as the probable cause was determined to be the improper stowage of the hoist hook assembly following hoisting operations, which led to accelerated wear of the hoist cable close to the ball end where it enters the hook. Fortuitously, the failure occurred during a cable conditioning flight with a dummy weight on the hook.
The design, knowledge of, and adherence to appropriate procedures played a role in both these accidents. In the case of the Biscarosse accident last year, mixed messaging over the correct way to handle a hoist malfunction, and negative transfer of procedures applicable to other types of helicopter and hoist both contributed to a decision to continue to use a partially jammed hoist. Effective and unambiguous procedures have a hugely important role in guiding decision-making, and should help to prioritise safety in the decision-making process.
A framework for decision-making: Human, Helicopter, Hoist
Placed in the framework of the 3 Hs, it goes without saying that when winching these priorities should always be first Human, then Helicopter, and then Hoist. When in doubt about the integrity or functioning of the hoist or cable, the immediate action should always be to get the human cargo on the cable to a safe height and position before any further diagnosis of a malfunction takes place.
As with any other system, our technical knowledge will inform decision-making and the understanding of relative risk vs operational imperative, but we could probably all start from the same basic principles of:
- Human, Helicopter, Hoist.
- When in doubt; stop and make safe.
- Following an incident with the hoist or cable, never take cable structural integrity for granted.
- Inspect the cable as if you are the one hanging on it!
